This site uses cookies to improve your experience. To help us insure we adhere to various privacy regulations, please select your country/region of residence. If you do not select a country, we will assume you are from the United States. Select your Cookie Settings or view our Privacy Policy and Terms of Use.
Cookie Settings
Cookies and similar technologies are used on this website for proper function of the website, for tracking performance analytics and for marketing purposes. We and some of our third-party providers may use cookie data for various purposes. Please review the cookie settings below and choose your preference.
Used for the proper function of the website
Used for monitoring website traffic and interactions
Cookie Settings
Cookies and similar technologies are used on this website for proper function of the website, for tracking performance analytics and for marketing purposes. We and some of our third-party providers may use cookie data for various purposes. Please review the cookie settings below and choose your preference.
Strictly Necessary: Used for the proper function of the website
Performance/Analytics: Used for monitoring website traffic and interactions
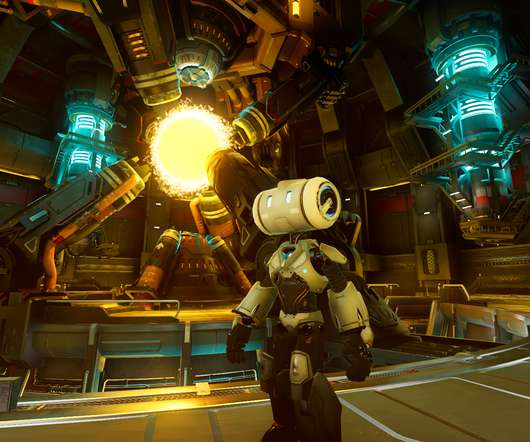
Here you can see some screenshots: Comparison between no indirect lighting (top), and baked indirect lighting (bottom) in the TPS demo. Cornell box test using baked indirect lighting. My first task will be integrating an occlusion culling system into the new Vulkan renderer. Debug output of the prototype implementation.
Raise errors when accessing deleted objects in debug. Raise errors when accessing deleted objects in debug. but going one step too far: in debug builds in 3.2.3, It was reusing parts of the code for baking GIProbes, and that made it quick but not great in terms of quality. HTML5: Threads, GDNative, AudioWorklet.
The new NavigationServer adds support for obstacle avoidance using the RVO2 library, and navigation meshes can now be baked at runtime. Following on from the addition of OccluderShapeSphere in 3.4 , lawnjelly now brings us a more adaptable and easy way to add basic occlusion culling in the form of the OccluderShapePolygon.
The new NavigationServer adds support for obstacle avoidance using the RVO2 library, and navigation meshes can now be baked at runtime. Following on from the addition of OccluderShapeSphere in 3.4 , lawnjelly now brings us a more adaptable and easy way to add basic occlusion culling in the form of the OccluderShapePolygon.
The new NavigationServer adds support for obstacle avoidance using the RVO2 library, and navigation meshes can now be baked at runtime. Following on from the addition of OccluderShapeSphere in 3.4 , lawnjelly now brings us a more adaptable and easy way to add basic occlusion culling in the form of the OccluderShapePolygon.
This adds support for obstacle avoidance using the RVO2 library, and navigation meshes can now be baked at runtime. Following on from the addition of OccluderShapeSphere in 3.4 , lawnjelly now brings us a more adaptable and easy way to add basic occlusion culling in the form of the OccluderShapePolygon. back in 2020!
The new NavigationServer adds support for obstacle avoidance using the RVO2 library, and navigation meshes can now be baked at runtime. Following on from the addition of OccluderShapeSphere in 3.4 , lawnjelly now brings us a more adaptable and easy way to add basic occlusion culling in the form of the OccluderShapePolygon.
Thanks to all pre-release testers who help us find and debug regressions! Core: Disable decayment of freed Objects to null in debug builds ( GH-41866 ). Rendering: Disable lights for objects with baked lighting ( GH-41629 ). Rendering: Various fixes to light culling ( GH-46694 ). stable soon™.
The new NavigationServer adds support for obstacle avoidance using the RVO2 library, and navigation meshes can now be baked at runtime. Following on from the addition of OccluderShapeSphere in 3.4 , lawnjelly now brings us a more adaptable and easy way to add basic occlusion culling in the form of the OccluderShapePolygon.
The new NavigationServer adds support for obstacle avoidance using the RVO2 library, and navigation meshes can now be baked at runtime. Following on from the addition of OccluderShapeSphere in 3.4 , lawnjelly now brings us a more adaptable and easy way to add basic occlusion culling in the form of the OccluderShapePolygon.
The new NavigationServer adds support for obstacle avoidance using the RVO2 library, and navigation meshes can now be baked at runtime. Following on from the addition of OccluderShapeSphere in 3.4 , lawnjelly now brings us a more adaptable and easy way to add basic occlusion culling in the form of the OccluderShapePolygon.
Added to that fact, Vulkan still has years to go until it's properly supported in most desktop and mobile platforms, which makes it unattractive to implement for us (as it means considerably more effort to write, debug and maintain). This allows beautiful mixing between baked and real-time. Perform Subsurface Scattering.
We organize all of the trending information in your field so you don't have to. Join 5,000+ users and stay up to date on the latest articles your peers are reading.
You know about us, now we want to get to know you!
Let's personalize your content
Let's get even more personalized
We recognize your account from another site in our network, please click 'Send Email' below to continue with verifying your account and setting a password.























Let's personalize your content